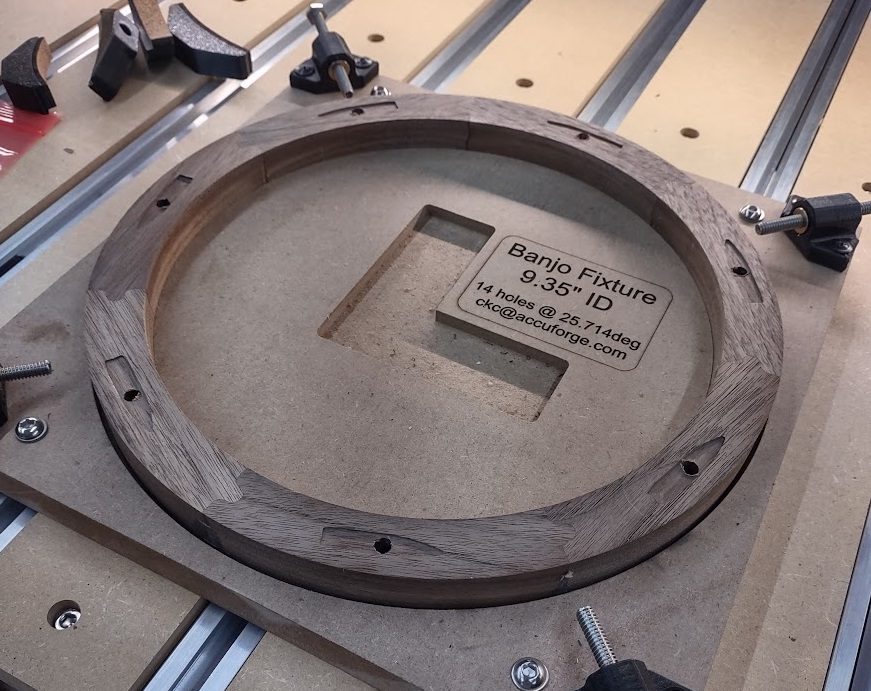
I've again started building banjos on my new Shapeoko 5 Pro CNC
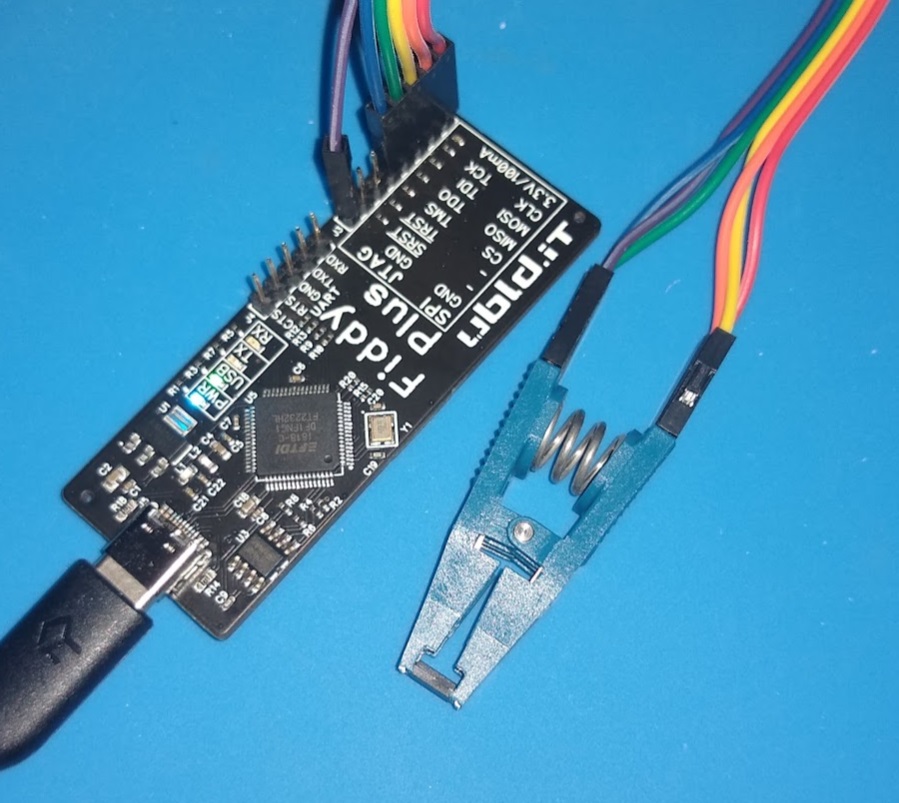
The GitHub Repository for the documentation and examples for this board is here.
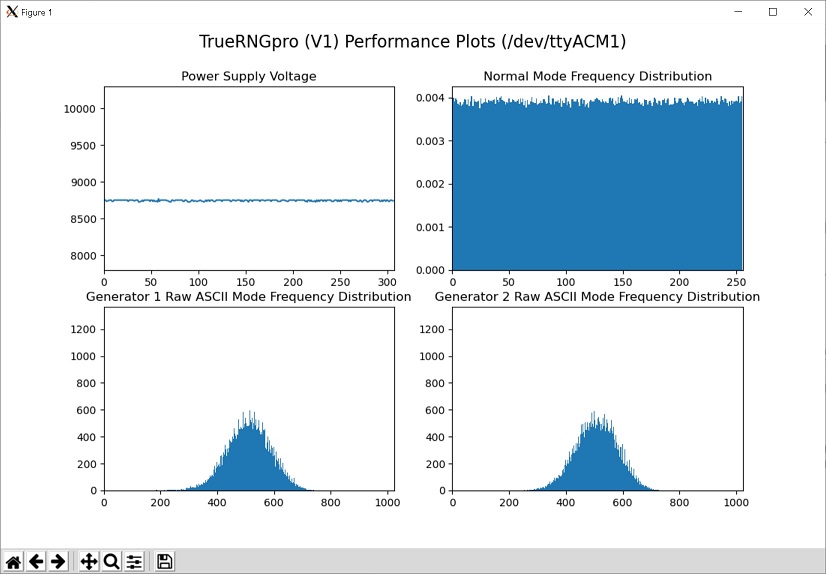
I have written and tested a set of Python utilities for TrueRNG devices



Here are the results of moving from a 0.30mm to a 0.25mm layer height and optimizing the settings.
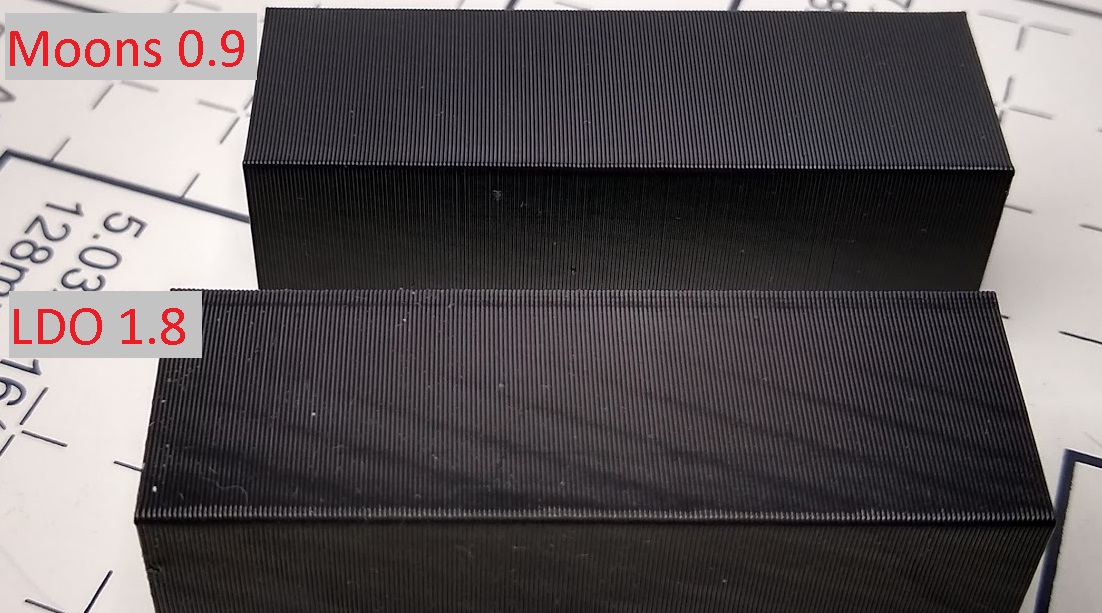
This is the exact same g-code that I printed before and after the motor swap. It's hard to photograph but it's a huge difference. I wish that Prusa had offered the 0.9° Moons motors as an upgrade option when new.
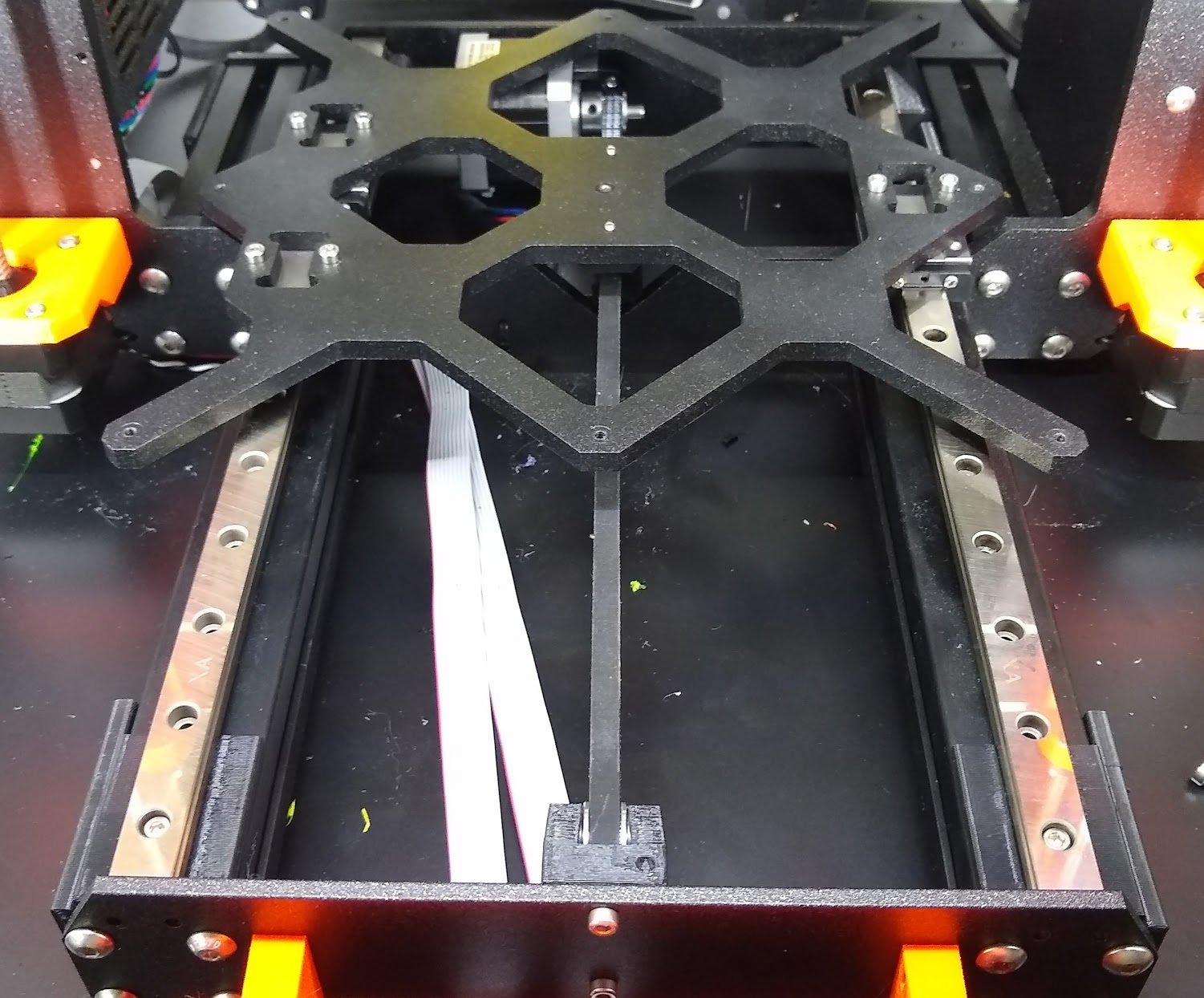
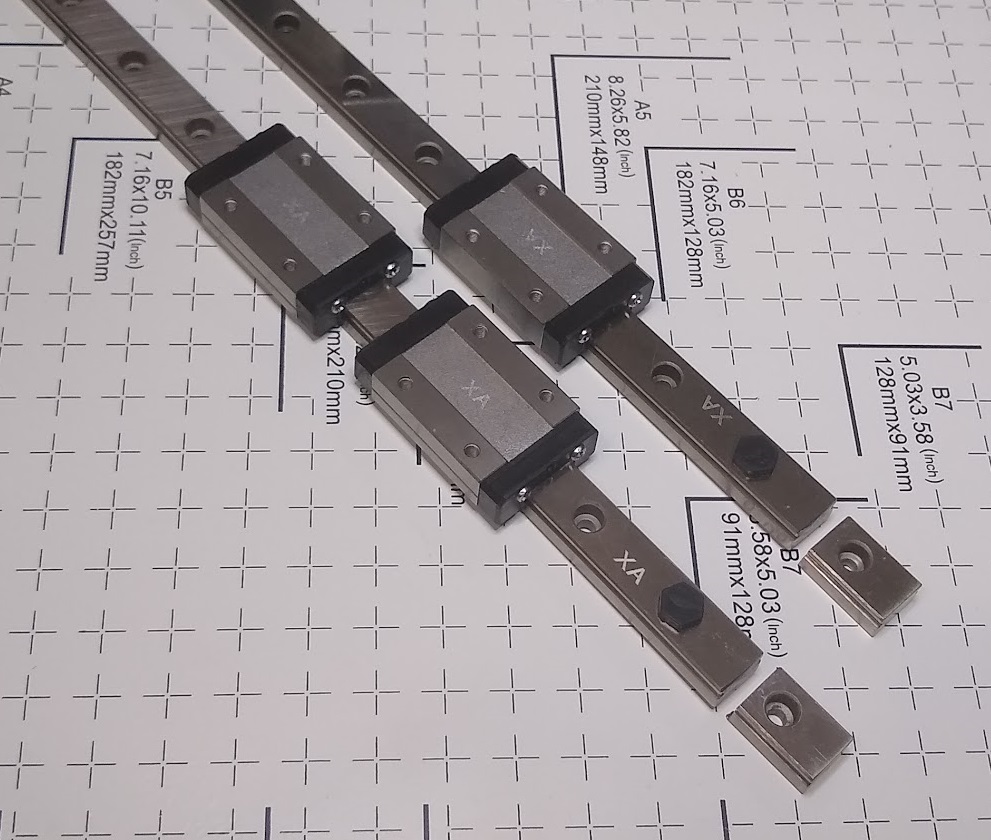
I tried a few different rods and bearings for the Y-axis but they all seem to have some degree of racking. You can check this by holding the left side of your bed solid and trying to move the right side forward/back. Any amount of movement implies that there is some amount of rotational movement on the bed when the y-axis moves.

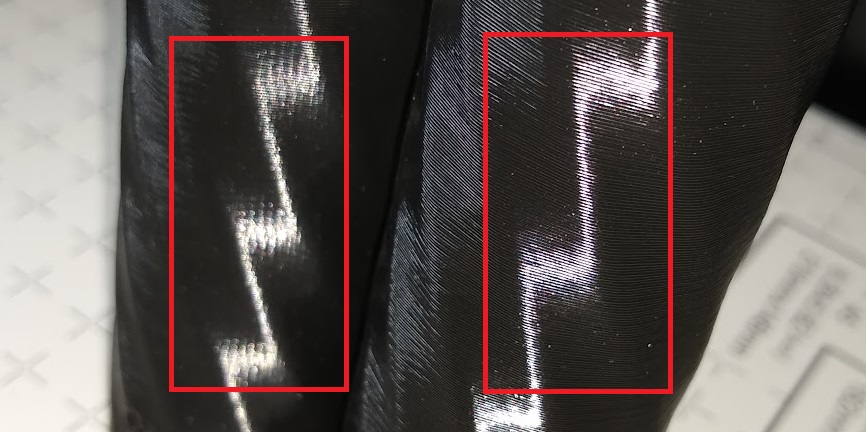
These are a direct mechanical replacement for the stock Prusa X and Y Stepper motors. The issue that I was seeing was Vertical Fine Artifacts when moving at 20 to 35 mm/s. This appears to be caused by resonances from the motors when operating at certain speeds. You can often hear that at certain speeds the machine vibrates. I believe that is what was causing my issue.
Just got this new Cosori Food Dehydrator to use for drying filament.

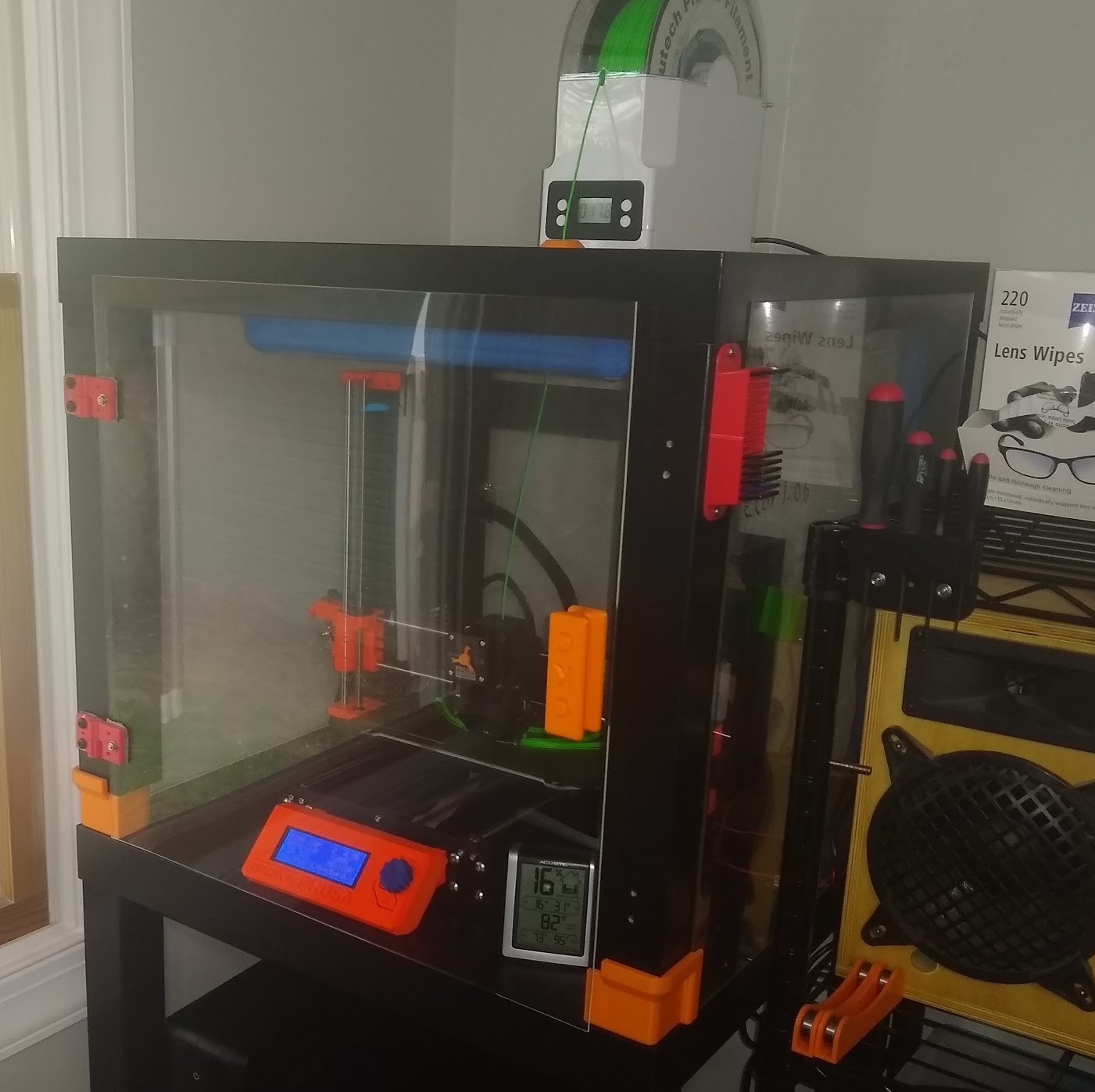
I've been doing a lot of 3D printing on my Prusa MK3S and wrote up an article about how I do reliable ABS printing.
I made some RF Magnetic Loop Probes for WCTF Foxhunting / other uses.

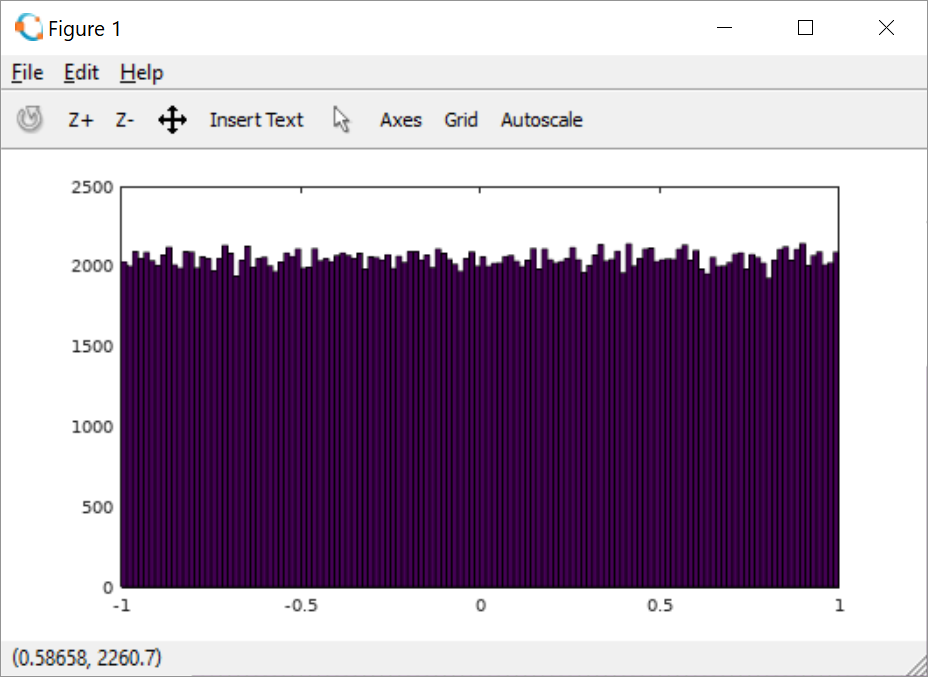
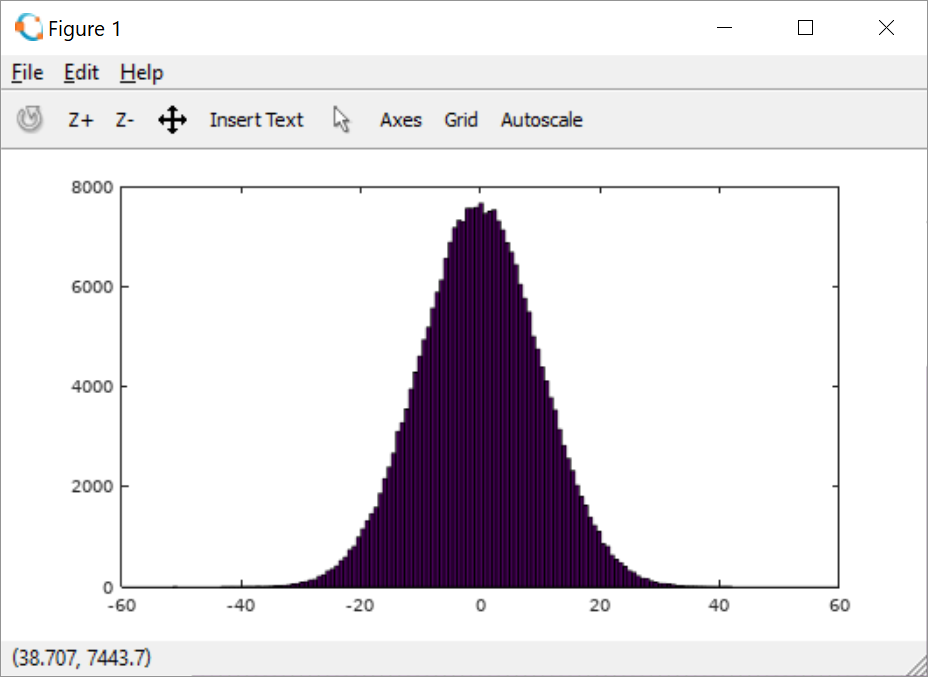
The TrueRNGv2/3 and many other random number generators often provide a uniform distribution output. This article shows how to convert this to a Gaussian Distribution
We've gotten a few questions about using the TrueRNG as a random number server so I banged out this quick example.
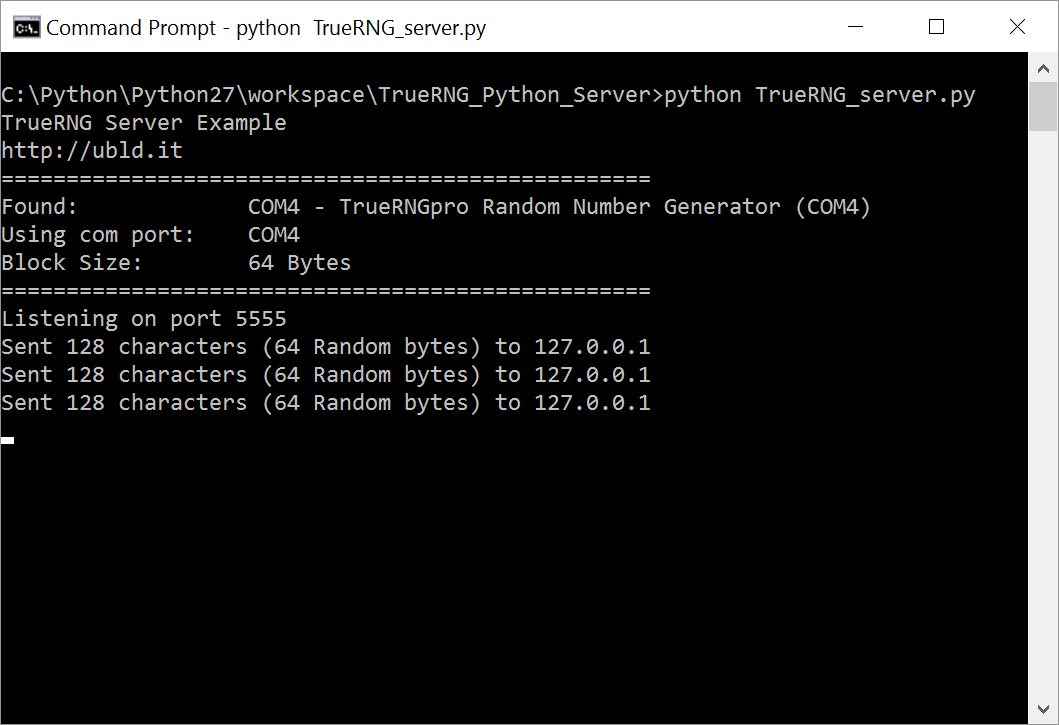
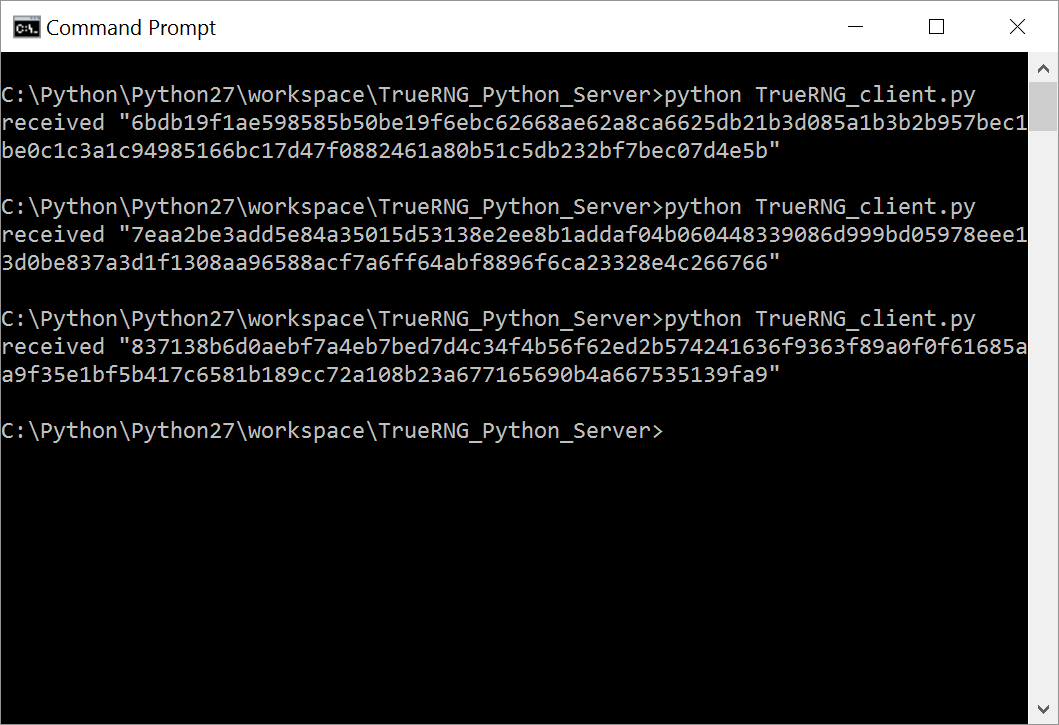
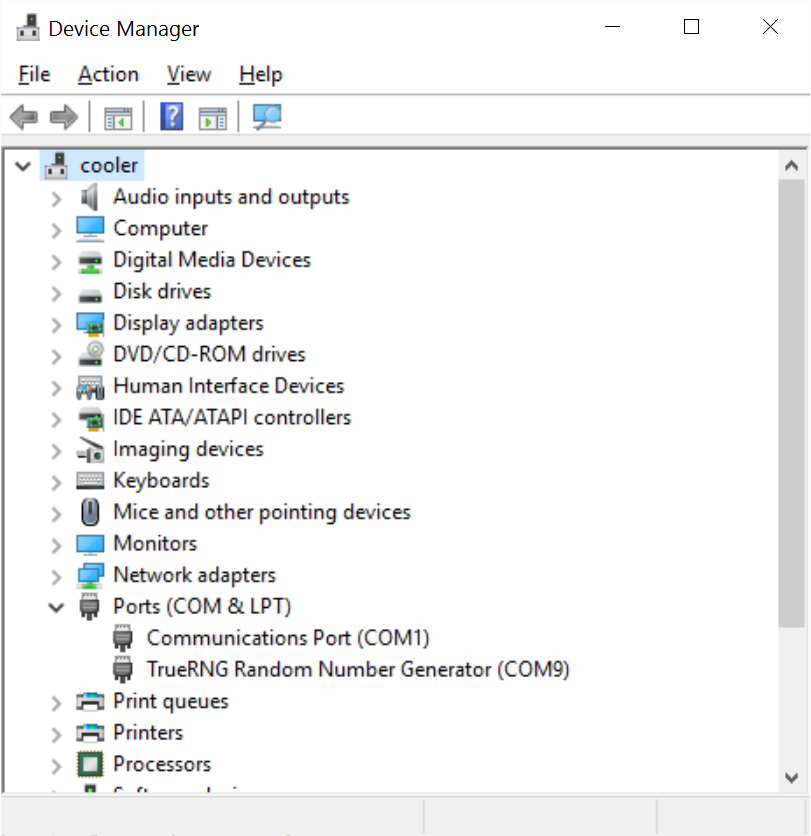
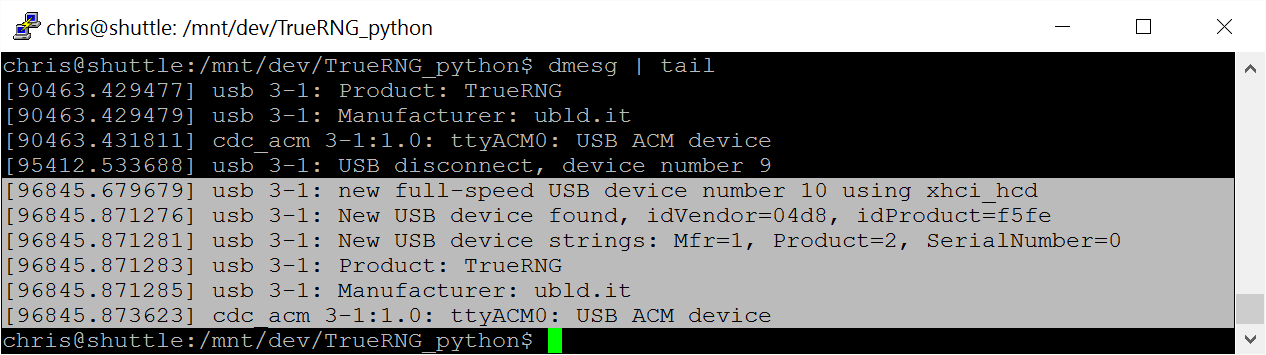
We get questions about how to use our TrueRNG random number generators so I thought I would write a tutorial on how to get it running with Python on Windows and Linux
I wrote up an article on testing the TrueRNG using ent, rngtools, and dieharder. I talk about the meaning of the results and the statistics that are expected for a good hardware random number generator.